这里的自制并非“从沙子到计算机”。原因在于参阅了磨消费级镜片的资料后,打消了致敬列文虎克的念头。
所以两块主要的反射镜和目镜直接购买。剩下的以3D打印为主。
11.15-11.25
产生了将zemax仿真变为现实的想法。
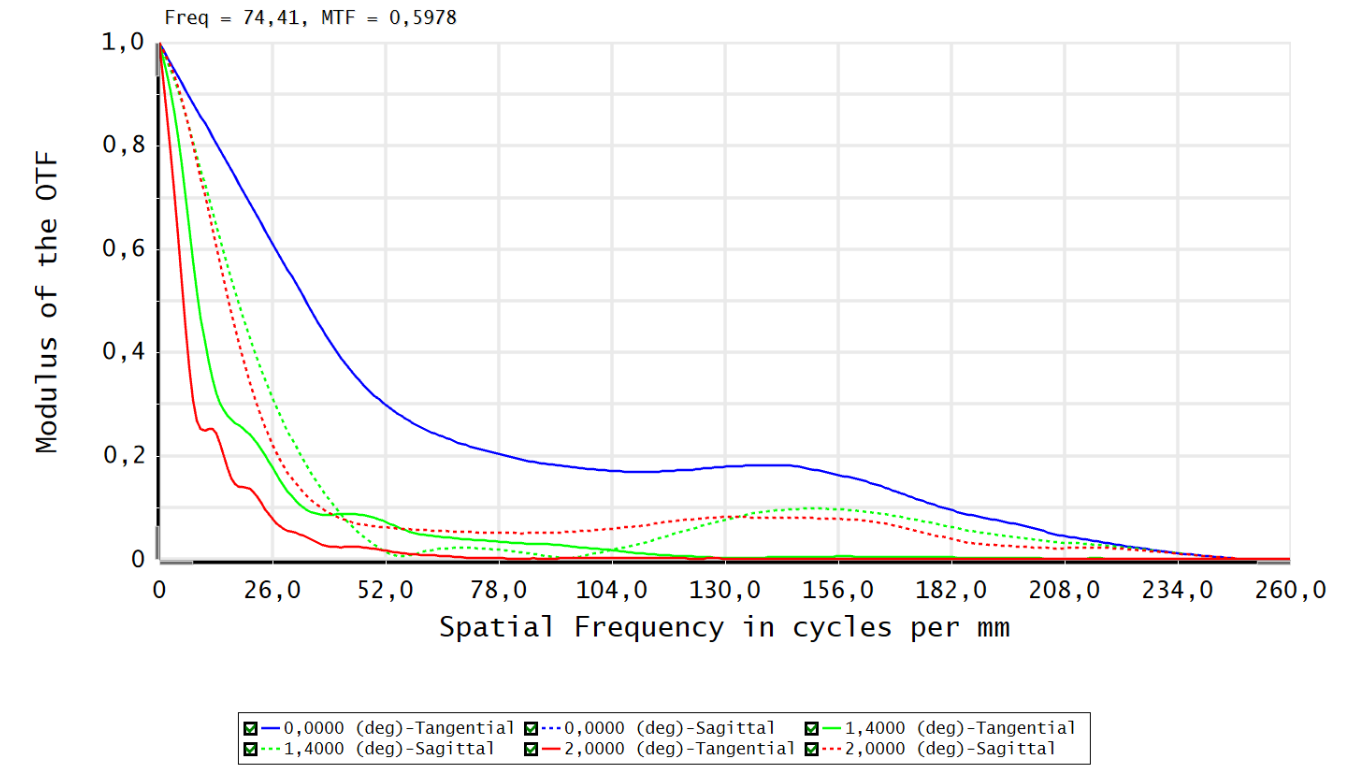
开始按照市面上常见的主反射镜、副镜在zemax中确定参数。我希望一开始定的目标不能低:看到月球的环形山,看到木星及四颗伽利略卫星的位置,看到土星(环?)……诸如此类大致在目视星等在5左右的天体。
于是选择口径大一点的。主镜口径114mm,焦距900mm;副镜尺寸25mm。因此整个镜筒长度在1米左右,口径16cm。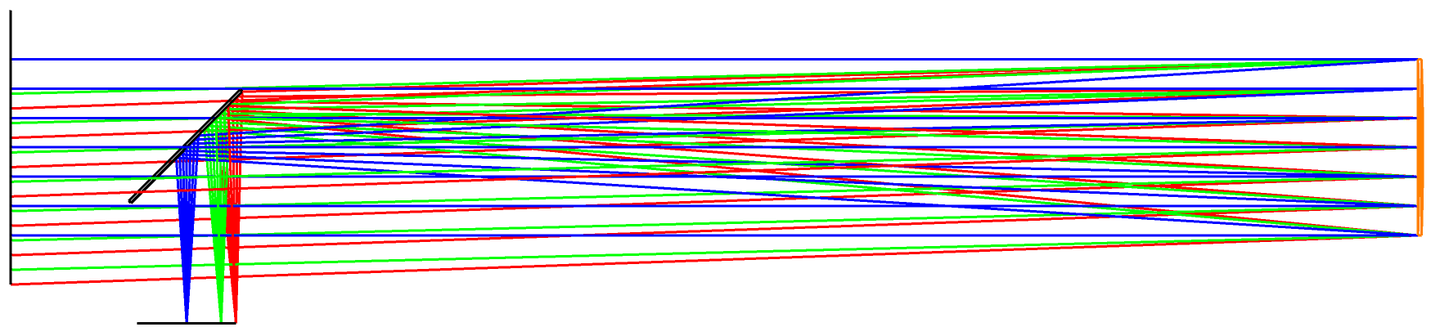
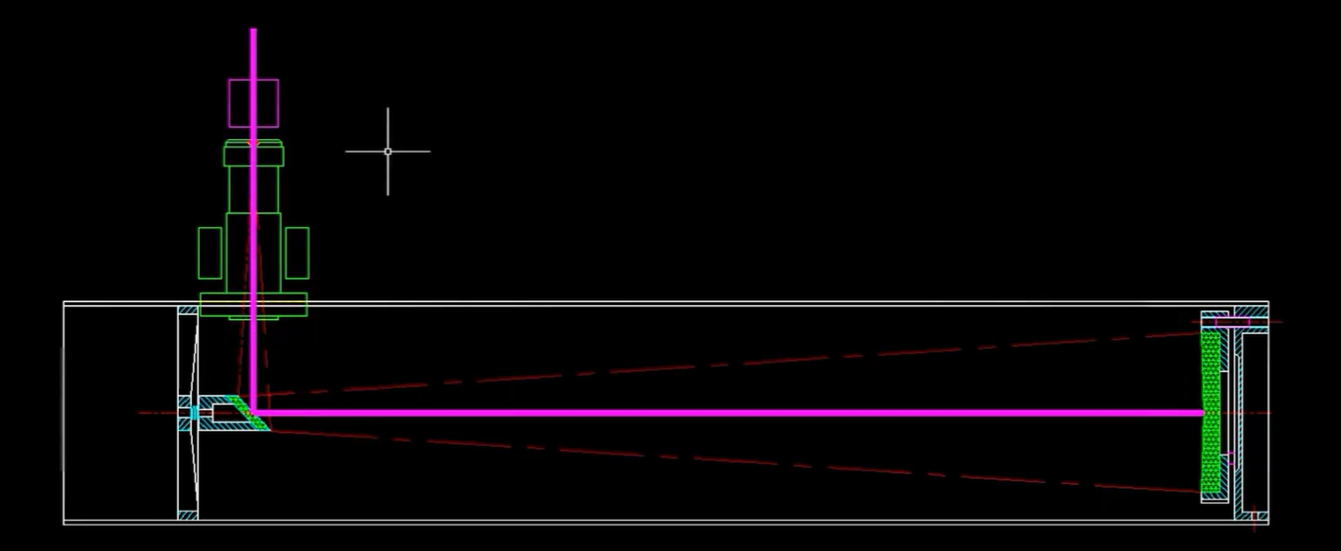
从原理上看,牛顿反射式结构算是所有反射式望远镜最简单,当然也是最经典的结构。它由于反射从原理上消除了色差,结构上也只需一块大口径的微凹面镜汇聚来自宇宙的微弱的光线至副镜,之后再反射到目镜中进入人眼。
当然,为了实现望远效果,我们需要精心安排主副镜的位置,这些都体现在光学设计图纸中。
11.26
按照图纸将大部分零件配齐,3D打印件、一根PVC管作为镜筒、一些螺钉螺丝螺母……


开始动工:遇到很头疼的问题是,如何让开的孔保持在一个水平面上。课本上的液滴平衡水平等方法显得十分苍白无力。
干到最终的结果是两颗孔找到了基准,最后一个以目测为主。
等到最后的光学自准直时候再校准吧。
只能说,理论、仿真、代码是一直以来的舒适区,像装调、定位这样的工作会让人头很疼。
11.27-11.29
由于3D打印无法打印螺纹,花了几天的课余时间钻上螺纹,这是个体力活,没什么好说的。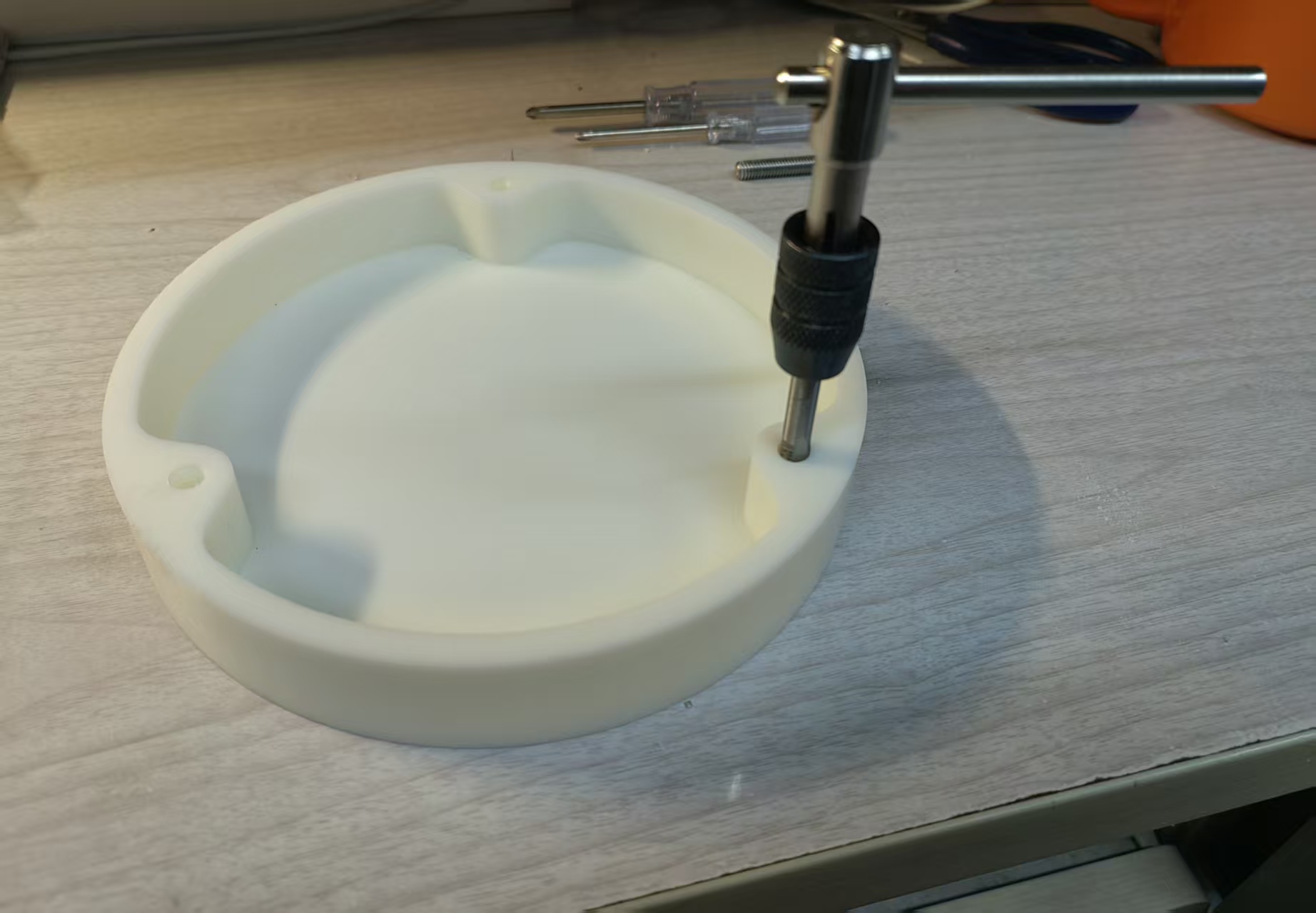
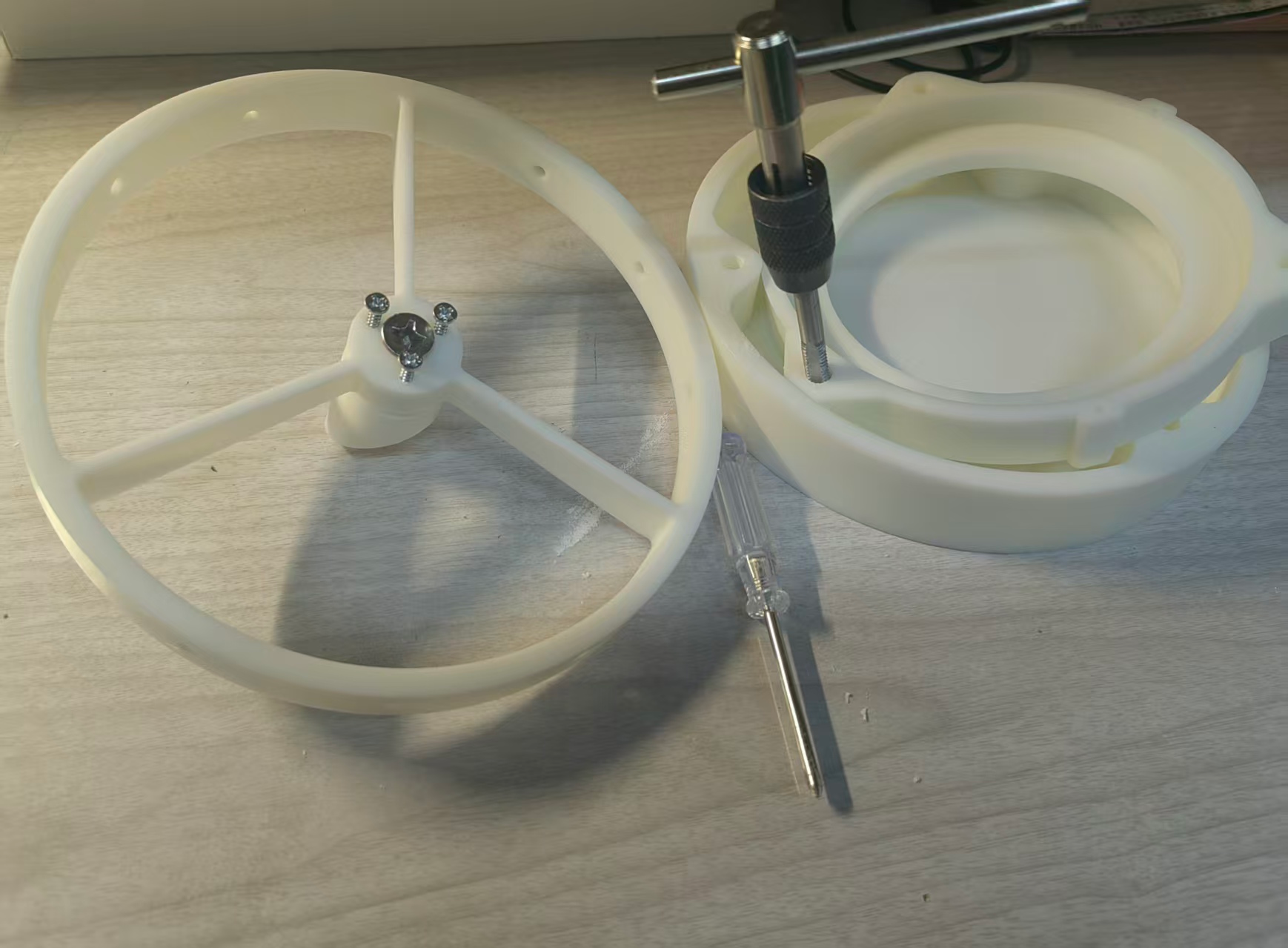
之后就可以组装镜片,再将镜座固定在镜筒里。
11.30
用3D打印的支架、螺丝、激光笔等自制一个光轴校准器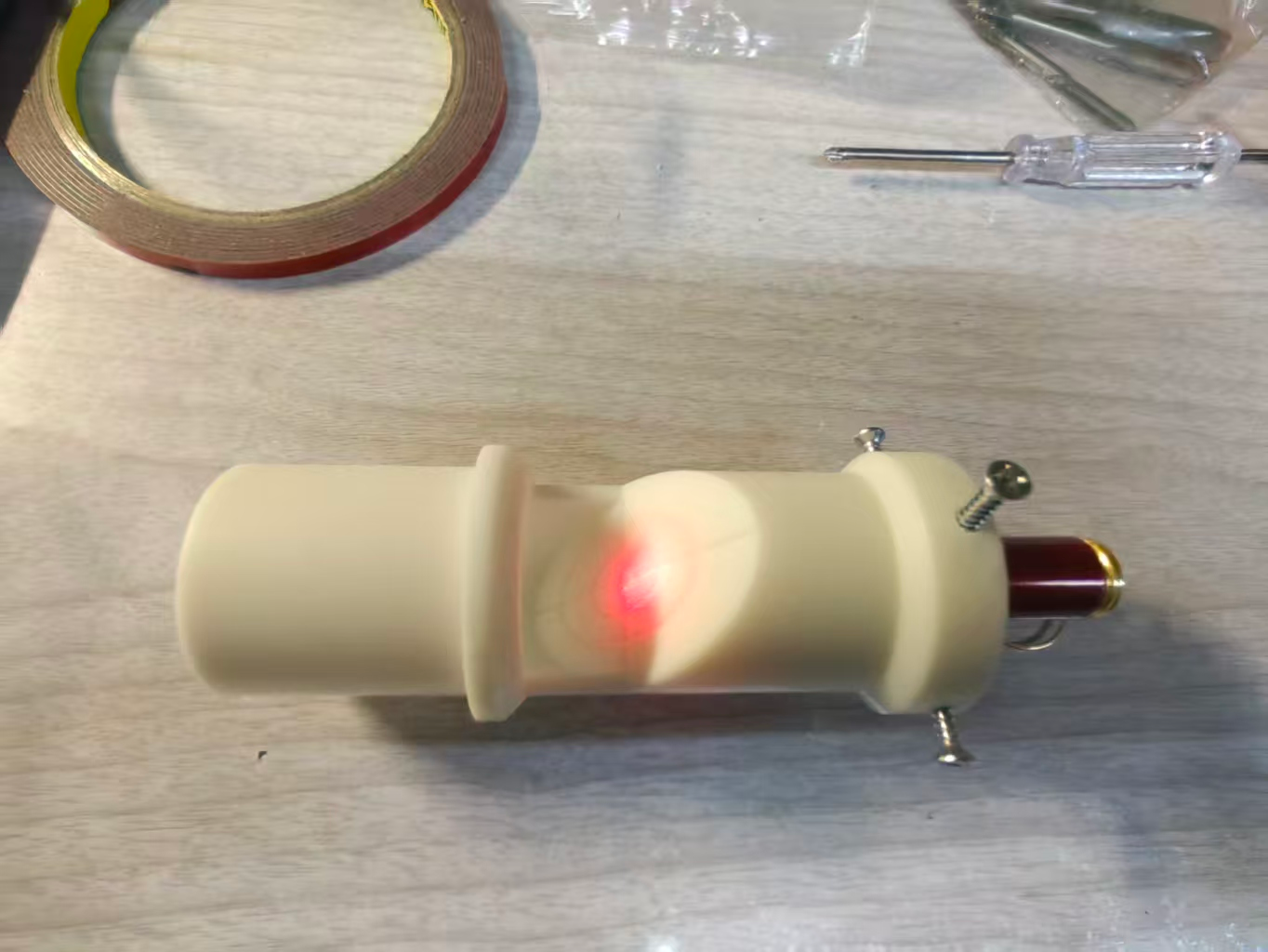
主要应用光学自准直原理,当光能原路返回时,才能看到清晰的像。
12.1
毫无疑问令人有些沮丧。
预计这天我是要拿到一个说得过去的反馈。
可惜在外面冻了俩小时看到的月亮几乎没有轮廓。
12.2
发现问题还是在光轴。
稍微调了一下,有所改善。但受限于手机对着目镜拍摄以及光轴还是差一点,只能说能辨认出来轮廓。

这是下午调光轴用远处橘色的大楼做了做测试,能看到窗户和墙缝的轮廓。
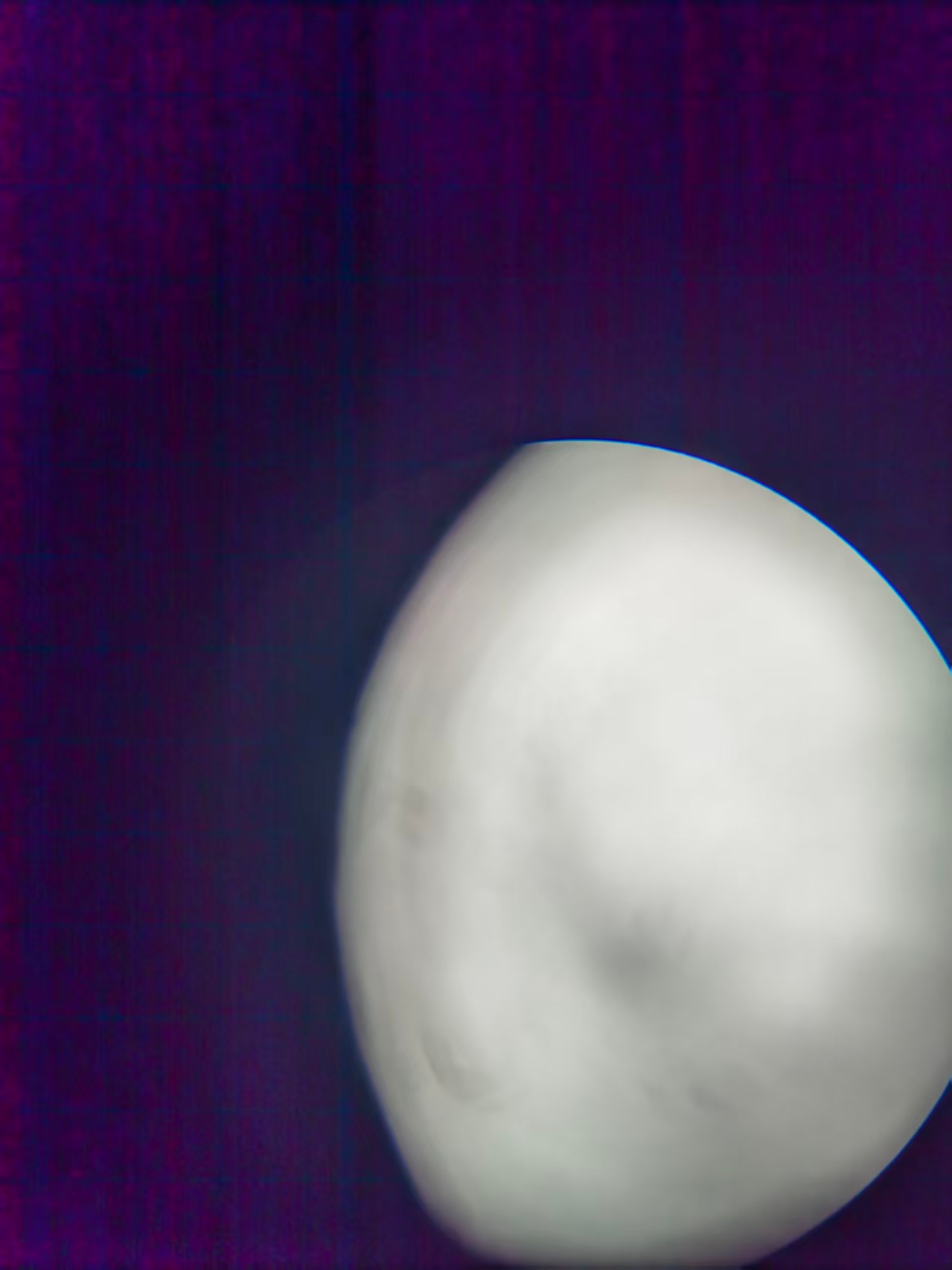
晚上开始拍月亮,放大率肯定是够了,甚至依稀辨认出了危海盆地。
拿到了在我这里过关的第一步反馈,用以验证这样的设计、装调是否在正确的路线上。
接下来的计划是:
version 1.1.0:装上寻星镜和三脚架,不想每天抱着这个5公斤重的大家伙健身了。
version 1.2.0:利用面阵CCD制作电子目镜,可以将更好地记录、存储、处理、分享照片。